- ›
- Teknik ›
- Handbok Drivsystem › Positioneringsteknik
Positioneringsteknik
Ska man välja servo eller frekvensomriktare?
Ofta får man tillräckligt bra prestanda med frekvensomriktare och en standard asynkronmotor, men till en kostnad som är 25-30% av ett servosystem. Med rätt dimensionering och motorval kan man komma nära det man vanligtvis kallar servoegenskaper.
Se våra högpresterande frekvensomriktare.
Jämförelse servomotor och asynkronmotor
Teoretiskt är det ingen skillnad mellan en asynkron servomotor och en vanlig standardmotor. För att avge moment vid stillestånd kräver båda magnetisering och en statorfrekvens som är proportionell mot momentbehovet. Den viktiga skillnaden är att servomotorn är lång och smal för att tröghetsmomentet skall bli så lågt som möjligt och den är lindad för något lägre spänning och med lägre statortidskonstant.
Servoförstärkaren har en inre reglerloop för fältvektororienterad reglering och komplex överföringsfunktion som med inlagda motordata ger optimal snabbhet och noggrannhet.
Se våra servosystem med hög dynamik.
Hastighetsprofil
Såväl vid positionering med frekvensomriktare och normmotorer som med traditionella servosystem kan man använda sig av godtyckliga hastighetsprofiler som lätt anpassas till systemets mekaniska krav.
- Hastighet (0…100% av max) väljs av operatören
- Systemet skapar anpassad profil beroende på acceleration, deceleration, hastighet och sträcka
- Hög dynamisk stabilitet med S-ramper och PI-reglering.
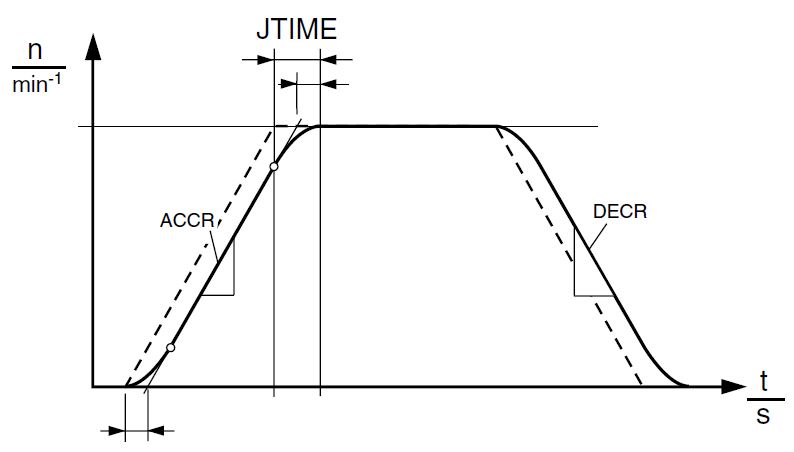
S-ramp, jerktime skonsamt mot mekaniken
Rundning av ramperna (heldragna kurvan) är skonsam för mekaniken och ökar därför livslängd och tillförlitlighet men förlänger accelerationstiden med den inställda rundningstiden JTIME.
Allmänt om positionering
Positioneringsnoggrannheten eller -onoggrannheten är maximala avvikelsen från önskad position. I praktiken användes två olika typer av mätvärdesbehandling i samband med positionering- Mätning av sträcka med incrementalgivare och räknare eller motsvarande, som kontinuerligt mäter sträcka eller cirkel under rörelsen. Mätresultatet återkopplas kontinuerligt.
- Positioneringsgivare typ gränslägesgivare, fotocell, elektromagnetisk sensor eller liknande, som ger signal först när en viss sträcka eller viss vinkel tillryggalagts.
- Mekaniska mätsystemet, t ex länkar och växlar.
- Drivutrustningens konstanta reaktionstid
- Upplösning hos incremental- resp positionsgivare
- Ibland av lastberoende eftersläpning av motorn.